Si ya vimos como configurar la consola remota PiKVM, para completar el kit podemos añadir algún que otro accesorio… Empezando por la impresión de carcasa oficial o con la modificación para un ventilador Noctua más silencioso.
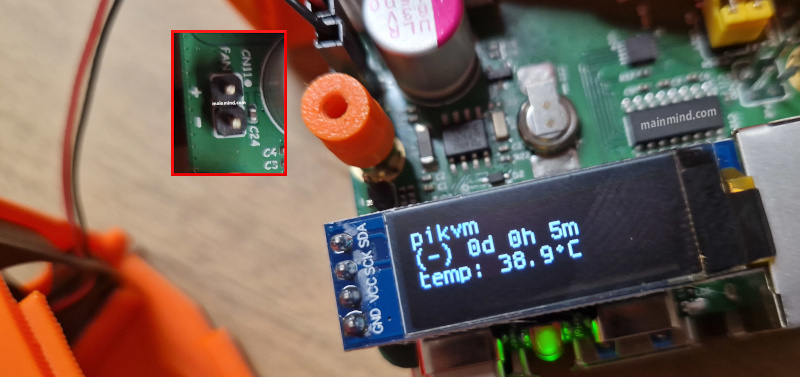
Dependerá del uso y la ubicación de nuestro PiKVM para elegir una de las soluciones. Realmente el pequeño ventilador de 5V habitual y los disipadores serán suficientes en la mayoría de casos, [conectar el cable rojo al positivo y el negro al negativo del conector FAN en el HAT].
Además añadiremos la pantalla OLED I2C para la que ya viene preparada la carcasa, no es realmente necesaria pero tendremos de un vistazo la IP, temperaturas, uso… y por menos de 2 € con envío… el conector en el propio HAT no tiene perdida para colocarlo.
Para ver las temperaturas actuales de la GPU y CPU de nuestra Raspberry Pi podemos verlas desde consola por comandos, tal vez sea interesante poder tener estos valores en la interfaz:
vcgencmd measure_temp
echo $(</sys/class/thermal/thermal_zone0/temp)/1000 | bc
Una vez conectados físicamente ambos, nos aseguramos que los servicios estén activos:
rw
systemctl enable --now kvmd-oled kvmd-oled-reboot kvmd-oled-shutdown
systemctl enable --now kvmd-fan
ro
Para este ventilador básico, podemos hacer que se encienda solo a partir de cierta temperatura. Crearemos el fichero /etc/conf.d/kvmd-fan:
KVMD_FAN_ARGS="--speed-idle=0 --speed-low=0 --speed-high=100 --speed-heat=100 --temp-low=50"
Y reiniciamos el servicio:
systemctl restart kvmd-fan
En mi caso, lo utilizo solo como encendido y apagado, me parecía que forzando velocidades inferiores era más ruidoso que al 100%
Podemos ir jugando según nuestro caso:
Hardware options:
--pwm-pin <N> ─── GPIO pin for PWM. Default: %d.
--pwm-low <N> ─── PWM low level. Default: %d.
--pwm-high <N> ── PWM high level. Default: %d.
--pwm-soft <N> ── Use software PWM with specified range 0...N. Default: disabled
--hall-pin <N> ── GPIO pin for the Hall sensor. Default: disabled
--hall-bias <N> ─ Hall pin bias: 0 = disabled, 1 = pull-down, 2 = pull-up. Default: %d.
Fan control options:
--temp-hyst <T> ───── Temperature hysteresis. Default: %.2f°C.
--temp-low <T> ────── Lower temperature range limit. Default: %.2f°C.
--temp-high <T> ───── Upper temperature range limit. Default: %.2f°C.
--speed-idle <N> ──── Fan speed below of the range. Default: %.2f%%.
--speed-low <N> ───── Lower fan speed range limit. Default: %.2f%%.
--speed-high <N> ──── Upper fan speed range limit. Default: %.2f%%.
--speed-heat <N> ──── Fan speed on overheating. Default: %.2f%%.
--speed-spin-up <N> ─ Fan speed for spin-up. Default: %.2f%%.
--speed-const <N> ─── Override the entire logic and set the constant speed. Default: disabled
-i|--interval <sec> ─ Iterations delay. Default: %.2f.
HTTP server options:
--unix <path> ─────── Path to UNIX socket for the /state request. Default: disabled
--unix-rm ────────── Try to remove old UNIX socket file before binding. Default: disabled
--unix-mode <mode> ─ Set UNIX socket file permissions (like 777). Default: disabled
Config options:
-c|--config <path> ─ Path to the INI config file. Default: disabled.
Logging options:
--verbose ─ Enable verbose messages. Default: disabled.
--debug ─── Enable verbose and debug messages. Default: disabled.
Help options:
-h|--help ──── Print this text and exit.
-v|--version ─ Print version and exit.```